職人技を自律学習 日立のフィジカルAI
株式会社日立製作所は、産業現場に導入後も自ら学習し続け、作業の速度・品質を向上させるフィジカルAI技術を開発した。製造・設備保守・ロジスティクスなど幅広い現場への適用を想定しており、これまで自動化が困難とされてきたワイヤーハーネスの組付けなど、柔軟物を繊細に扱う複雑作業まで現場適用レベルで実現する。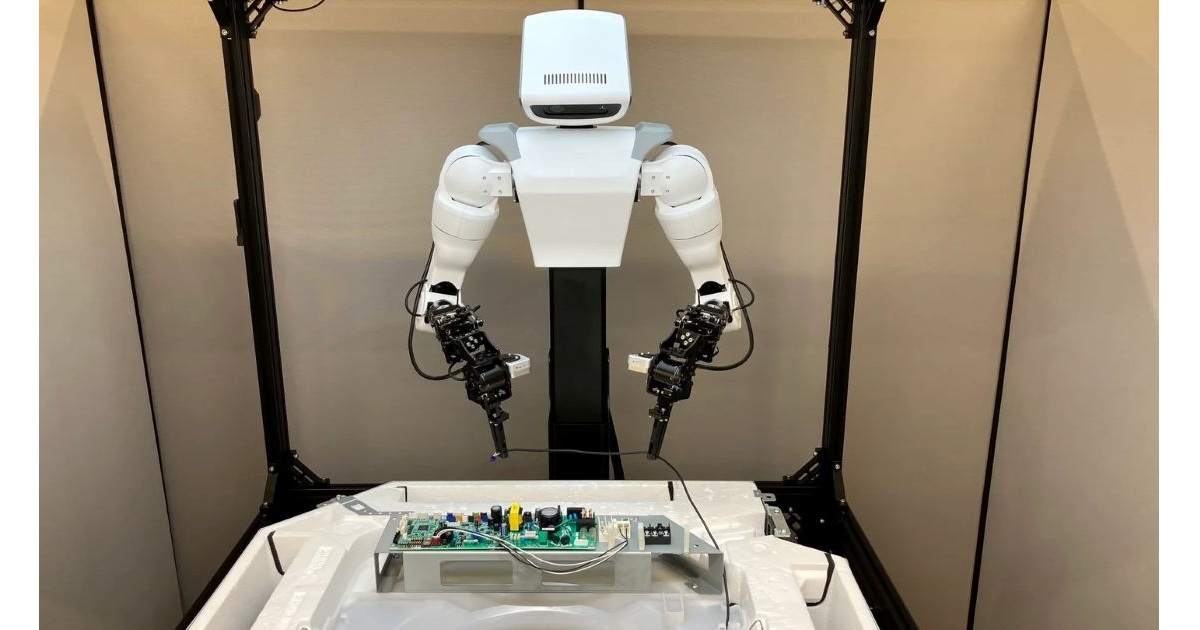
今回開発した技術の特長は三点ある。第一は、導入後も現場データや熟練作業者のノウハウをAIが自動的に取り込み、継続的に学習する仕組みだ。設備の入れ替えや製品仕様の変更があっても、大規模な再学習やシステム改修なしに最適動作へと自律的に進化し続ける。第二は、早稲田大学との共同研究で開発した「深層予測学習」を基盤とした毎秒100回の高速AIモデルだ。従来のロボットが毎秒10回程度の動作指示に限られていたのに対し、触覚センサーの情報を瞬時に処理して人間と同等の速度・精度を実現する。加えて小型・省電力設計のため、多様なロボットや現場への迅速な展開が可能だ。第三は、腕や手だけでなく上半身・下半身を含む全身の協調動作を学習するアルゴリズムである。作業内容に応じて最適な位置・姿勢を自律的に選択することで、作業品質のばらつきや手戻りを抑え、作業者の負担軽減にも貢献する。
開発にあたっては、「One Hitachi」のもとグループ総力を結集した体制を敷いている。本技術は、日立が2025年11月に発表したフィジカルAIやデジタルソリューション群「HMAX by Hitachi」の構築を支えるモデル「IWIM」の一つに位置づけられており、同社が長年にわたり社会インフラ領域で蓄積してきたドメインナレッジをAIに統合する形で開発が進められた。今後はグループ内外の現場での実証を重ねながら展開する方針で、その拠点として2026年4月1日に東京・大手町の協創施設「Lumada Innovation Hub Tokyo」内に「フィジカルAI体験スタジオ」を開設。本技術を搭載したロボットを常設してパートナーや顧客との協創を加速させる。
日本の産業現場では、労働力不足と熟練技能者の高齢化による技能継承の困難さが深刻な課題となっている。とりわけ多品種・多工程の現場では、ロボットの動作調整のたびに設備を停止する必要があり、汎用的な自動化の実現が壁となってきた。今回の技術は、現場稼働中に自律的に精度を高めるという点で、製造業をはじめとした幅広い産業の生産性向上と技能継承問題の解決に向けた新たなアプローチとして注目される。
